Що таке OAK-D Pro та її роль у комірці
OAK-D Pro — це компактна стерео-камера машинного зору, яка в нашій комірці використовується як джерело зображення та глибини для задач виявлення й позиціонування об’єктів. У конфігурації лабораторії застосовується USB-варіант камери: передача даних і живлення виконуються через USB-C.
На відміну від звичайної веб-камери, OAK-D Pro має не лише кольоровий сенсор, а й стереопару моно-камер та вбудовані інфрачервоні елементи підсвічування. Це дає змогу стабільніше отримувати глибину в сценах, де мало текстури або недостатньо світла.

Рисунок 8.2.1. Передній вигляд камери OAK-D Pro (референсне зображення)
Апаратна будова камери
З апаратної точки зору OAK-D Pro включає такі ключові вузли:
- RGB-камера — формує кольорове зображення сцени.
- Дві моно-камери (stereo pair) — використовуються для обчислення карти глибини.
- IR laser dot projector — створює інфрачервоний патерн для покращення depth на слабко-текстурованих поверхнях.
- IR flood LED — інфрачервоне підсвічування для роботи в умовах низького освітлення.
- IMU — інерціальний модуль (для орієнтації/руху системи).
- RVC2 (on-device compute) — обчислювальний модуль камери, який виконує частину CV/AI-обробки на самому пристрої.
- USB-C інтерфейс — один кабель для зв’язку з хостом і подачі живлення.
Таблиця 8.2.1. Основні апаратні компоненти OAK-D Pro (USB)
| Компонент | Призначення | Практична примітка для студента |
|---|---|---|
| RGB-камера | Кольоровий відеопотік | Використовується для візуального контролю сцени та детекції об’єктів |
| Stereo mono-камери | Розрахунок глибини | Потребують стабільного монтажу й коректної калібровки |
| IR dot projector | Покращення depth на «плоских»/малотекстурних поверхнях | Підвищує якість стерео в складних сценах |
| IR flood LED | Підсвітка при низькому освітленні | RGB-камера не використовує IR як основне джерело зображення |
| IMU | Інерціальні дані | Корисно для задач оцінки руху/орієнтації, якщо це потрібно |
| RVC2 | Локальна обробка CV/AI на камері | Зменшує навантаження на Jetson у частині обробки |
| USB-C | Дані + живлення | Якість кабелю та живлення напряму впливає на стабільність |
Підключення OAK-D Pro у нашій комірці
У лабораторній конфігурації камера підключається так:
- Закріпіть OAK-D Pro на жорсткому кронштейні без люфту й вібрацій.
- Під’єднайте камеру до Jetson через USB-C (data + power).
- Переконайтесь, що кабель не натягується під час руху робота та не входить у його робочу зону.
- Після запуску ПЗ відкрийте Налаштування → Перевірка камери / Запустити потік і переконайтесь, що є живе RGB-зображення; далі у вікні перегляду (або в Моніторингу) увімкніть depth-перегляд і перевірте, що карта глибини оновлюється без «завислих» кадрів. Якщо у вашій збірці немає перемикача depth, орієнтуйтесь на офіційний гайд Luxonis: https://docs.luxonis.com/hardware/products/OAK-D%20Pro%20W.
Примітка щодо живлення. Для Pro-камер із активованими IR-елементами інколи потрібне стабільніше зовнішнє живлення через Y-Adapter (якщо USB-порт хоста не забезпечує потрібний струм).
Можливості камери OAK-D Pro
Функціональні можливості OAK-D Pro:
- Забезпечує одночасне формування кольорового відеопотоку (RGB) та карти глибини (depth).
- Підтримує стерео-оцінку глибини в реальному часі для типових навчальних сценаріїв pick-and-place.
- Підвищує стабільність оцінки глибини на слабко текстурованих поверхнях за рахунок IR dot projector.
- Забезпечує роботу в умовах зниженого освітлення завдяки IR flood LED.
- Дозволяє виконувати частину обчислень безпосередньо на вбудованому процесорі камери (RVC2).
Апаратні та експлуатаційні обмеження OAK-D Pro:
- Камера не належить до засобів функціональної безпеки та не замінює E-STOP, safety scanner або захисні огорожі.
- Для прозорих, дзеркальних і виражено блискучих поверхонь коректність карти глибини може бути обмеженою.
- Досягнення метрологічно обґрунтованої точності позиціонування потребує калібрування системи «камера-робот».
- Камера не компенсує механічні похибки монтажу (вібрації, зміщення, люфт кріплення).
- Камера не замінює належної організації освітлення сцени; недостатнє або нестабільне освітлення знижує якість сприйняття.
Базове використання на лабораторній роботі
Базовий порядок роботи для студента:
- Візуально перевірити кріплення камери, чистоту оптики, положення кабелю.
- Увімкнути Jetson та ПЗ, переконатися, що камера визначилась системою.
- Перевірити, що відображається RGB-потік і карта глибини без пропусків кадрів.
- Зафіксувати робочу сцену (без зміни положення камери) і тільки потім виконувати калібрування/запуск задачі.
- Перед автоматичним циклом перевірити, що зона огляду камери відповідає робочій зоні робота.
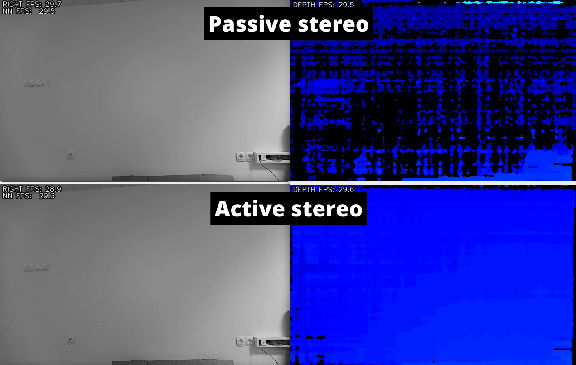
Рисунок 8.5.1. Приклад роботи активного стерео: порівняння без IR та з IR підсвічуванням
Додаткові ресурси
Для поглибленого налаштування використовуйте тільки офіційну документацію Luxonis:
- OAK-D Pro W (апаратні особливості Pro-лінійки, RVC2, IR, IMU):
https://docs.luxonis.com/hardware/products/OAK-D%20Pro%20W - Y-Adapter (коли потрібне зовнішнє живлення для USB-камер):
https://docs.luxonis.com/hardware/products/Y-Adapter - Платформені матеріали DepthAI (software/API, приклади, розширені можливості):
https://docs.luxonis.com/software-v3/depthai/release-notes
https://docs.luxonis.com/software-v3/depthai/depthai-components/nodes/neural_network/
Критерії якості калібрування (камера)
Калібрування вважається придатним до експлуатації, якщо одночасно виконано:
- Маркери стабільно детектуються в межах робочої області, а координатна прив’язка не демонструє помітного дрейфу під час повторних перевірок.
- Повторний запуск на контрольній сцені дає узгоджені позиційні оцінки без систематичного зсуву drop/target відносно робочої зони.
- Кріплення камери є жорстким і без люфту, а після калібрування не змінювались положення камери, кабелю та опорних елементів.
Повторне калібрування обов’язкове, якщо:
- Змінено монтаж або орієнтацію камери.
- Змінено фокус/оптику або відбулась механічна подія (удар, вібраційне зміщення).
- Виявлено стабільний зсув координатної прив’язки під час verification.
Фіксація в журналі:
- Дата/час, відповідальний оператор.
- Які артефакти збережено (calibration_bundle.npz, workspace_definition.npz).
- Результат контрольної перевірки (PASS/FAIL) і короткий коментар.