Анотація
- Технічне обслуговування може виконуватися лише компанією Profi Robotics Ukraine
- Перед проведенням технічного обслуговування або ремонту необхідно виконати візуальну перевірку обладнання та робочого місця відповідно до всіх вимог безпеки, наведених у цьому посібнику.
- Після заміни системи керування або вузлів осей робота необхідно виконати повторне калібрування робота. Процедура калібрування та метод перевірки результатів описані в інструкції з перевірки нульових позицій. Також необхідно перевірити параметри системи. Якщо є резервна копія параметрів — її можна імпортувати; якщо ні — параметри потрібно налаштувати повторно.
Щоденна інспекція
Загальне очищення
Якщо на контролері або маніпуляторі робота виявлено пил, бруд або моторну оливу, їх можна видалити ганчіркою, змоченою очищувальним засобом.
Допустимі очищувальні засоби:
- вода;
- ізопропіловий спирт;
- 10% розчин етанолу;
- 10% розчин нафтового розчинника (нафти).
У дуже рідкісних випадках у зоні осей кобота може з’являтися невелика кількість мастила. Це не впливає на роботу або термін служби редуктора чи вісі в цілому. Не використовуйте стиснене повітря для очищення контролера або маніпулятора, оскільки це може пошкодити ущільнення та внутрішні компоненти.
Перевірка контролера
Для коректної роботи системи необхідно проводити перевірки працездатності різних функціональних частин контролера.
Таблиця 6.2.1 План необхідних інспекцій контролреа під час експлуатації
| Елемент перевірки | Метод | Щомісяця | Раз на пів року | Щороку |
|---|---|---|---|---|
| Кнопка аварійної зупинки на ручному пульті оператора | Функціональна перевірка | X | ||
| Режим вільного переміщення (Free Drive) | Функціональна перевірка | X | ||
| Входи та виходи безпеки | Функціональна перевірка | X | ||
| Кабелі та адаптери пульта керування | Візуальний огляд | X | ||
| Клеми на шафі керування | Функціональна перевірка | X | ||
| Головне живлення та вимикачі шафи керування | Функціональна перевірка | X |
Перевірка кнопки аварійної зупинки на ручному пульті оператора
- Натисніть кнопку аварійної зупинки (Emergency Stop).
- Переконайтесь, що робот зупиняється, після чого живлення осей вимикається.
- Після цього перезапустіть робота.
Перевірка режиму вільного переміщення (Free Drag Mode)
- Відповідно до характеристик інструмента зніміть додаткове обладнання або встановіть TCP / навантаження.
- Натисніть і утримуйте кнопку Free Drag на кінці маніпулятора, щоб перевести робота в режим вільного переміщення.
- Перемістіть робота в положення, де він горизонтально витягнутий до межі робочої зони.
- Утримуючи кнопку Free Drag, перевірте, що робот утримує своє положення без додаткової підтримки.
Перевірка безпечних входів та виходів
- Перевірте, які входи та виходи безпеки активні, та протестуйте, чи коректно вони спрацьовують.
Візуальна перевірка
- Від’єднайте кабель живлення від контролера.
- Перевірте, чи правильно підключені клеми та чи відсутні ослаблені проводи.
- Перевірте, чи не ослаблений мережевий кабель всередині контролера.
- Перевірте, чи відсутні пил або забруднення всередині контролера. За необхідності очистіть його пилососом із захистом від статичної електрики.
Robot
Таблиця 6.2.2 План необхідних інспекцій маніпулятора під час експлуатації
| Елемент перевірки | Метод | Щомісяця | Раз на пів року |
|---|---|---|---|
| Перевірка кришок шарнірів | Візуальний огляд | X | |
| Перевірка гвинтів кришок | Функціональна перевірка | X | |
| Перевірка ущільнювальних кілець (O-ring) | Візуальний огляд | X | |
| Перевірка кабелів робота та їхніх з’єднань | Візуальний огляд | X | |
| Перевірка болтів кріплення маніпулятора робота | Функціональна перевірка | X | |
| Перевірка болтів кріплення інструмента | Функціональна перевірка | X | |
| Перевірка гвинтів, що з’єднують шарніри | Функціональна перевірка | X |
Мета функціональної перевірки — переконатися, що гвинти, болти, інструмент та елементи маніпулятора не ослаблені. Гвинти та болти, зазначені в плані перевірки, необхідно перевіряти за допомогою динамометричного ключа.
Типові помилки
У цьому розділі наведено деякі типові помилки, які можуть виникати під час експлуатації робота. Якщо виникають інші помилки, які неможливо усунути, можна завантажити файл журналу (log) робота через інтерфейс журналів та надіслати його службі післяпродажної підтримки для аналізу та усунення проблеми.
Сингулярність/помилка оберненого кінематичного розв’язку
Робоча зона робота має форму сфери, радіус якої дорівнює досяжності маніпулятора.Однак існують деякі особливі положення та орієнтації, які є сингулярними точками для робота, і їх необхідно уникати під час роботи.
Нижче наведено три типові приклади сингулярностей:
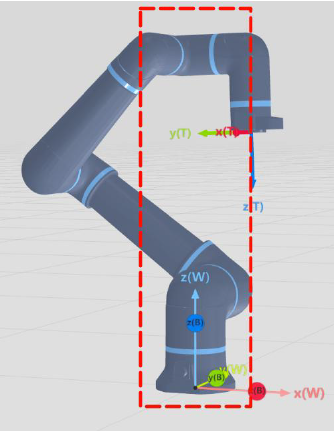
Рис. 6.3.1 Циліндрична область, основою якої є площина основи робота.
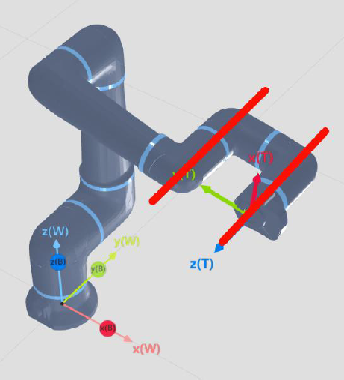
Рис. 6.3.2 Вісі A3, A4 та A6 робота розташовані паралельно
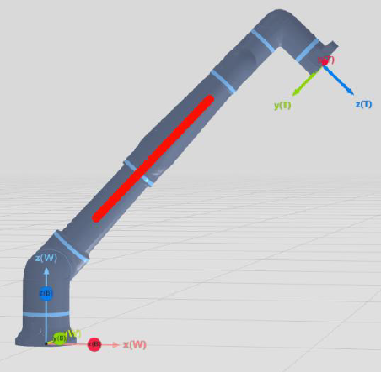
Рис. 6.3.3 Кут між верхньою та нижньою ланками маніпулятора робота наближається до 180°
Спрацювання системи виявлення зіткнення
Датчики крутного моменту в осях робота здійснюють безперервний контроль сил, що діють на робот, у режимі реального часу. Якщо виміряне значення перевищує допустиме, система виявлення зіткнення активується.
У такому випадку необхідно перевірити:
- чи правильно задано траєкторію руху робота;
- чи відсутні перешкоди в зоні переміщення робота.
Якщо траєкторія руху задана правильно, але система виявлення зіткнення продовжує спрацьовувати, необхідно перевірити:
- правильність налаштування інструмента;
- правильність налаштування навантаження;
- стан та прокладання комунікацій або шлангів кінцевого інструмента.
Перевищення обмежень положення/швидкості
Якщо під час роботи робот перевищує допустимі обмеження положення або швидкості, необхідно перевірити правильність написання програми.
Якщо програма написана коректно, можна змінити відповідні обмеження параметрів у налаштуваннях безпеки.
Якщо виникла помилка перевищення межі положення, і після скидання помилки робот залишається в стані перевищення обмеження та знову видає сигнал тривоги після подачі живлення, можна активувати режим відновлення (rescue mode), щоб перевести робот у безпечне робоче положення.
Похибка відстеження осей вище норми
Якщо під час руху робота виникає надмірна похибка відстеження положення осей, необхідно перевірити:
- чи є швидкість і прискорення руху допустимими;
- чи правильно задане навантаження робота;
- чи не перевищує навантаження допустиму вантажопідйомність робота.
Скидання аварійного повідомлення
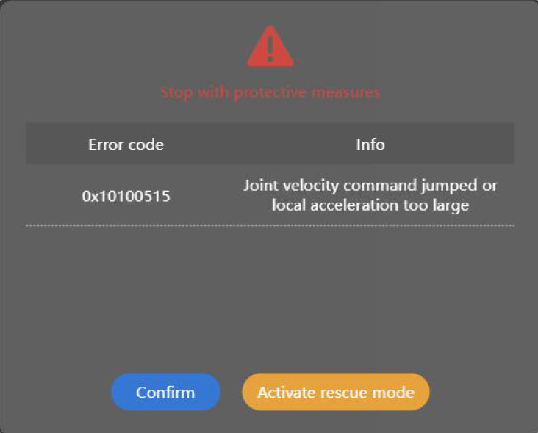 Рис.6.3.4 Приклад помилки в інформаційному вікні
Рис.6.3.4 Приклад помилки в інформаційному вікні
Коли з’являється спливаюче вікно з повідомленням про помилку, можна активувати режим відновлення (Rescue Mode) або натиснути «OK», після чого вручну виконати скидання помилки та перейти до режиму відновлення.
Порядок скидання аварійного повідомлення в режимі відновлення:
a) Натисніть“ ”, далі“
”, далі“ ”щоб скинути аварійний сигнал.
”щоб скинути аварійний сигнал.
б) Натисніть кнопку“ ” для увімкнення режиму відновлення.
” для увімкнення режиму відновлення.
в) Натисніть кнопку“ ” для подачі живлення на робот.
” для подачі живлення на робот.
г) У режимі відновлення перемістіть осі, що перевищили допустимі межі, у правильне положення, використовуючи керування відповідними осями.
д) Натисніть кнопку“ ” для вимкнення кобота.
” для вимкнення кобота.
е) Натисніть кнопку“ ” для виходу з режиму відновлення.
” для виходу з режиму відновлення.
ф) Повторіть крок 3 для повторної подачі живлення на робот.
Опис кодів несправностей
Наразі для робота передбачено 6 рівнів інформаційних повідомлень. Четверта цифра коду помилки визначає рівень помилки.
Таблиця 6.4.1 Рівні помилок та опис
| № | Помилка та рівень |
|---|---|
| 0 | Системна зайнятість |
| 1 | Системне повідомлення |
| 2 | Попередження |
| 3 | Загальна помилка |
| 4 | Критична помилка |
| 5 | Фатальна помилка |
- У разі виникнення загальної або більш серйозної помилки робот вимикається та припиняє роботу.
- У разі виникнення попередження робот зменшує швидкість і зупиняється.
- Якщо одночасно виникає кілька помилок, обробляється помилка з найвищим рівнем критичності.
- Для одного типу помилки використовується один код, але детальний опис помилки відображається на операторській панелі.
- Детальні коди помилок та їх опис наведено у додатку.