Інтерфейс фланця
Основа маніпулятора оснащена силовим багатоконтактним роз’ємом підвищеної надійності (heavy-duty interface).На кінці маніпулятора встановлені кнопки керування та світлові індикатори.На боковій частині фланця інструмента розміщені кнопки, дисплей та авіаційний роз’єм. Загальний вигляд інтерфейсу фланця наведено на рисунку 5.1.1.
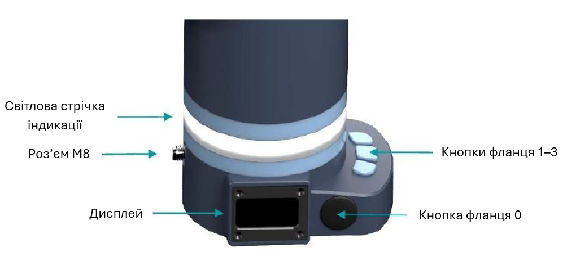
Рисунок 5.1.1 Загальний вигляд інтерфейсу фланця
Таблиця 5.1.1
| Інтерфейс | Опис |
|---|---|
| M8 | Живлення, входи/виходи та комунікаційні сигнали |
| Кнопка фланця 0 | Кнопка з можливістю налаштування користувацьких функцій; за замовчуванням — режим вільного ведення (Free Drag) |
| Кнопки фланця 1–3 | Користувацькі кнопки для налаштування функцій у меню конфігурації |
| Дисплей | Відображає стан робота, стан шинної комунікації, стан входів/виходів, швидкість передачі RS485, стан користувацьких кнопок тощо |
| Світлова стрічка | Світлова індикаційна стрічка стану робота |
Таблиця 5.1.2
| Колір | Інформація |
|---|---|
| Синій (постійне світіння) | Виконується ініціалізація системи |
| Білий (постійне світіння) | Робот увімкнений, але приводи осей не активовані |
| Зелений (постійне світіння) | Ручний режим роботи |
| Жовтий (миготіння) | Автоматичний режим виконання програми |
| Червоний (миготіння) | Помилка робота |
Конектор M8 на фланці робота розташований на тильній стороні кінцевого фланця. Розподіл контактів та їх призначення наведені нижче.
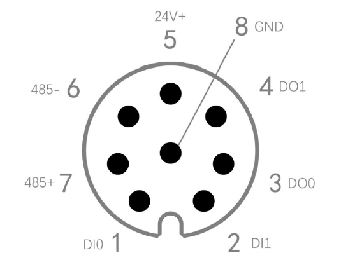
Рисунок 5.1.2 Контакти конектору M8 на фланці
Таблиця 5.1.3 Контакти конектору M8 на фланці
| № | Позначення | Призначення |
|---|---|---|
| 1 | DI0 | Цифровий вхід 0 (flangeDI0) |
| 2 | DI1 | Цифровий вхід 1 (flangeDI1) |
| 3 | DO0 | Цифровий вихід 0 (flangeDO0) |
| 4 | DO1 | Цифровий вихід 1 (flangeDO1) |
| 5 | 24V+ | Позитивний полюс живлення 24 В для зовнішнього обладнання |
| 6 | 485− | Лінія RS485 − (A) протоколу MODBUS |
| 7 | 485+ | Лінія RS485 + (B) протоколу MODBUS |
| 8 | GND | Загальний провід (внутрішня земля фланця); земля |
Кабель для інтерфейсу M8 — Lumberg KKMV 8-354 або Lutronic FP-222460.Інтерфейс забезпечує зовнішнє живлення 24 В DC з максимальним струмом до 2 А.Цифрові виходи виконані за схемою PNP, максимальний вихідний струм — 5 мА. Виходи формують лише рівневі сигнали та не призначені для безпосереднього керування навантаженням.
Цифрові входи також виконані за схемою PNP. У разі використання перемикача як джерела сигналу для цифрового входу (DI), підключення виконується згідно з наведеною нижче схемою.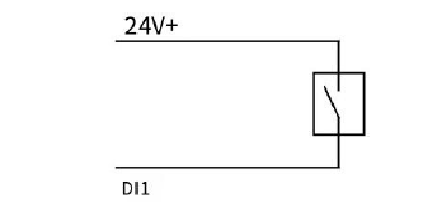
Рисунок 5.1.2 Схема підключення перемикача до цифрового входу типу PNP
Інформація на дисплеї
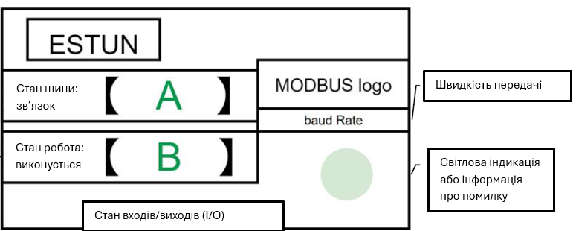
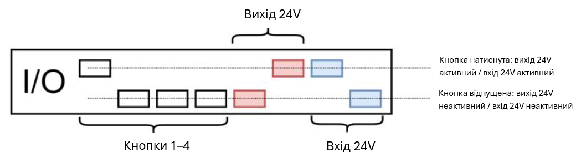
Рисунок 5.2.1 Інформація на дисплеї фланця
Таблиця 5.2.1. Інформація дисплея фланця
| Інформація | Опис |
|---|---|
| Стан шини | Offline (червоний): стан EtherCAT — INIT. Зазвичай виникає під час запуску системи або коли кабель зв’язку між контролером і фланцем відключений. Mailbox (жовтий): стан EtherCAT — PreOP або BOOT. Виникає після оновлення прошивки фланця або коли PDO ще не встановлено. Live (зелений): стан EtherCAT — SafeOP або OP. Це означає, що кабель зв’язку підключений правильно і обмін даними з контролером відбувається нормально. Error (червоний): стан EtherCAT несподівано змінено з OP на INIT. Зазвичай виникає при підключенні кабелю під час обміну даними, раптовому вимкненні контролера або програмному перезапуску. |
| Стан робота | Normal (зелений): робот працює без помилок. Error (червоний): робот працює з помилкою. |
| Стан I/O | Високий стан означає, що відповідний сигнал активний; низький стан означає, що відповідний сигнал неактивний. |
| Швидкість MODBUS | Підтримувані швидкості MODBUS: 115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200, 600 бод. Значення налаштовується через параметри системи. |
| Світлова індикація / повідомлення про помилки | Повільне зелене мигання (2 с): з’єднання ще не повністю встановлене (INIT, BOOT, PreOP). Швидке зелене мигання (0,5 с): встановлено зв’язок у реальному часі (SafeOP, OP). Червоне мигання (2 с): аномальне роз’єднання зв’язку (OP → INIT). Повідомлення про помилку: робот повідомляє про помилку та відображає сигнал аварії. |
Інтерфейс контролера
На передній панелі шафи керування розташована лише одна кнопка живлення.
Коли система вимкнена, натисніть і утримуйте цю кнопку протягом кількох секунд, щоб запустити систему робота.
Коли система увімкнена, натисніть і утримуйте кнопку протягом кількох секунд, щоб вимкнути систему робота.

Рисунок 5.3.1 Кнопка включения на контролері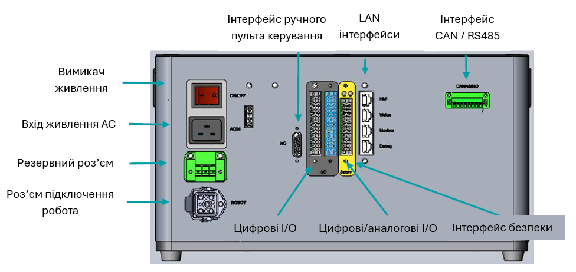
Рисунок 5.3.2 Загальний вигляд інтерфейсів шафи керування
Таблиця 5.3.1 Опис інтерфейсів контролера
| Інтерфейс | Опис |
|---|---|
| Вхід живлення AC | Для підключення до мережі змінного струму AC100–240 В, 50/60 Гц |
| Вимикач живлення | Перемикач живлення |
| Інтерфейс ручного пульта | Підключення ручного пульта керування |
| Авіаційний роз’єм робота | Використовується для підключення робота до шафи керування для подачі живлення та забезпечення зв’язку з роботом |
| LAN | Для підключення навчального пульта, систем технічного зору, промислових шин та для налагодження і розробки |
| CAN/RS485/I/O | Інтерфейс CAN / RS485 / входи-виходи |
| Інтерфейс безпеки | Порти, пов’язані з функціями безпеки |
| Аналогові / цифрові I/O | Аналогові та цифрові входи-виходи |
| Цифрові I/O | Цифрові входи-виходи |
Інтерфейс безпеки
Інтерфейс безпеки складається з 7 груп двоканальних безпечних інтерфейсів. Перша–третя групи призначені для інтерфейсів захисної зупинки (Protective Stop), а четверта–сьома групи — для інтерфейсів аварійної зупинки (Emergency Stop). Внутрішні реле безпеки для інтерфейсів захисної зупинки та аварійної зупинки реалізовані у вигляді двох незалежних каналів. За замовчуванням на виробництві ці роз’єми з’єднані по горизонталі жовтими перемичками. Якщо ці перемички відсутні, стан аварійної зупинки не може бути скинутий.
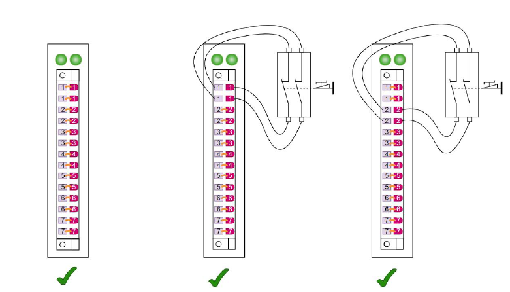
Рисунок 5.3.3 Приклад правильного підключення інтерфейсу захисної зупинки
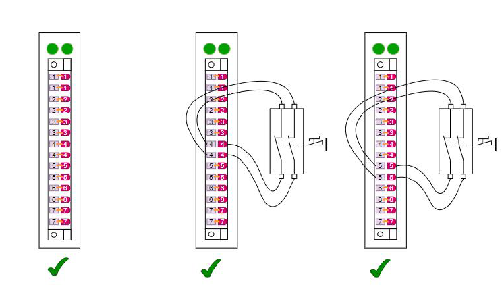
Рисунок 5.3.4 Приклад правильного підключення інтерфейсу екстреної зупинки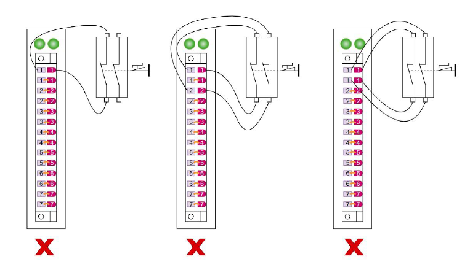
Рисунок 5.3.5 Типові приклади неправильного підключення захисної зупинки та аварійної зупинки безпеки
Специфікація входів/виходів
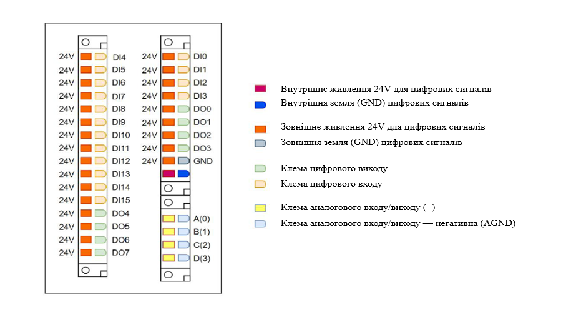
Рисунок 5.3.6 Функції кожної клеми модуля входів/виходів
Підключення зовнішнього живлення для цифрового входу
При подачі цифрових сигналів на вхід необхідно забезпечити живлення порту. Використовуйте зовнішнє джерело живлення та підключайте вхід через реле або цифровий ланцюг типу PNP.
Схема підключення наведена нижче як приклад.
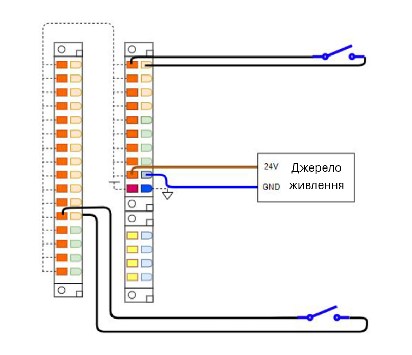
Рисунок 5.3.7 Приклад підключення релейного цифрового входу
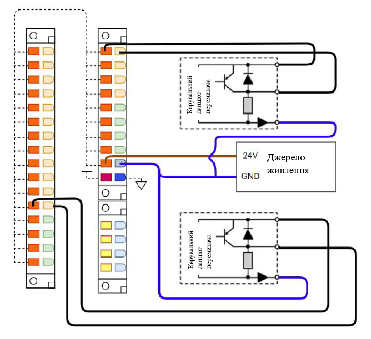
Рисунок 5.3.7 Приклад підключення релейного цифрового входу
Підключення внутрішнього живлення для цифрового входу
Цифровий вихід, підключений до клем пристрою, живиться від зовнішнього джерела живлення. Вихідна клема підключається через реле або ланцюг типу PNP. Схема підключення наведена нижче.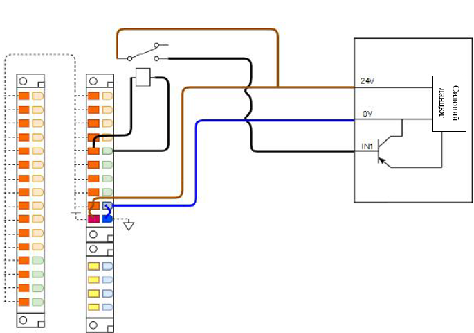
Рисунок 5.3.8 Приклад підключення цифрового виходу через реле
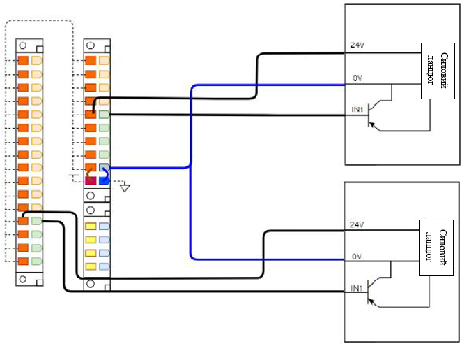
Рисунок 5.3.9 Приклад підключення цифрового виходу через ланцюг PNP
Таблиця 5.3.2 Параметри цифрових виходів
| Цифровий вихід | Параметр |
|---|---|
| Тип інтерфейсу | PNP |
| Вихідна напруга | Типово 24 В; максимум 30 В |
| Максимальний вихідний струм | Максимум 125 мА для однієї групи |
Підключення аналогових входів та виходів
Аналоговий вхід підтримує підключення датчиків напругового та струмового типу. Тип сигналу (напруга або струм) необхідно встановити в налаштуваннях робота. Аналоговий вихід підтримує лише струмовий сигнал.
 | УВАГА! Порт аналогового виходу повинен бути підключений до навантаження, інакше система робота згенерує помилку. Ви можете вимкнути відповідний аналоговий вихід через інтерфейс керування роботом. |
|---|
Нижче наведено різні варіанти підключення.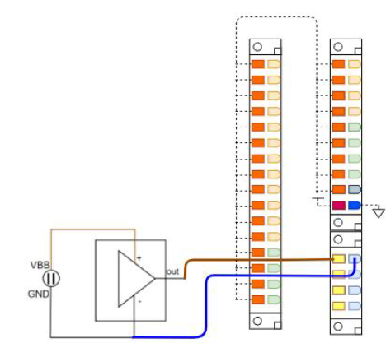
Рисунок 5.3.10 Приклад правильного підключення аналогового входу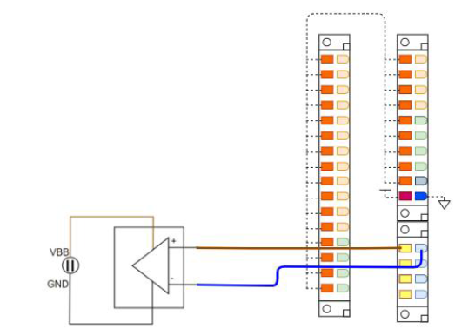
Рисунок 5.3.11 Приклад правильного підключення аналогового виходу
Таблиця 5.3.3 Параметри аналогових входів
| Параметр | Значення |
|---|---|
| Роздільна здатність | 12 біт |
| Діапазон вимірювання | У режимі напруги: 0–10 В |
| У режимі струму: 4–20 мА | |
| Вхідний опір | У режимі струму: 20 Ом |
Таблиця 5.3.4 Параметри аналогових виходів
| Параметр | Значення |
|---|---|
| Роздільна здатність | 12 біт |
| Вихідний сигнал | Струмовий режим: 4–20 мА |
Інтерфейс CAN/485/IO
Призначення контактів інтерфейсів CAN, RS485 та I/O на шафі керування наведено нижче: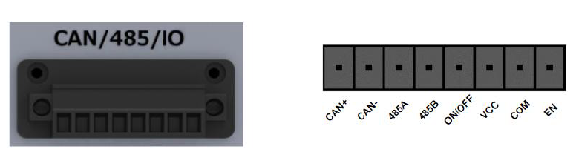
Рисунок 5.3.12 Вигляд роз’єму CAN/485/IO
Таблиця 5.3.5 Опис призначення контактів на фішці
| Порт | Опис |
|---|---|
| CAN+ | Лінія CAN High шини CAN для підключення зовнішніх пристроїв по протоколу CAN. |
| CAN− | Лінія CAN Low шини CAN для підключення зовнішніх пристроїв по протоколу CAN. |
| 485A | Лінія A (485+) інтерфейсу RS-485 для диференційного зв’язку. |
| 485B | Лінія B (485−) інтерфейсу RS-485 для диференційного зв’язку. |
| ON/OFF | Вхід для підключення зовнішньої кнопки запуску/зупинки системи робота. |
| VCC | Лінія живлення (опорна напруга) для формування сигналу запуск/зупинка. |
| COM | Спільний контакт (загальний провід) для сигналу запуск/зупинка. |
| EN | Вхід дозволу роботи системи (Enable), використовується внутрішньою кнопкою запуску/зупинки або сигналом дозволу. |
Різні способи підключення увімкнення та вимкнення живлення:
Cпосіб 1: Використовуйте кнопку живлення на шафі керування або на ручному пульті для увімкнення та вимкнення системи.
Клеми COM та EN необхідно з’єднати перемичкою.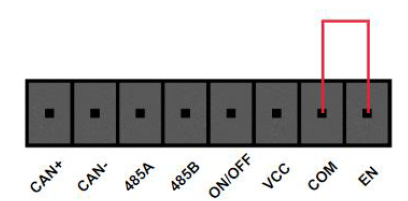
Рисунок 5.3.13 Схема підключення запуску живлення (1)
Спосіб 2: Зовнішня кнопка запуску/зупинки живлення
З’єднайте клеми COM та EN перемичкою, а клеми ON/OFF і VCC підключіть до зовнішньої кнопки з нормально відкритим контактом (NO) з автоматичним поверненням.
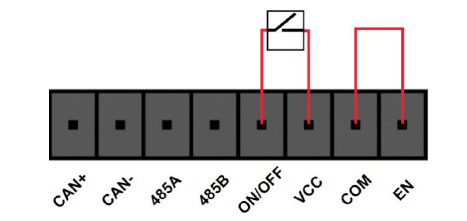
Рисунок 5.3.14 Схема підключення запуску живлення (2)
Спосіб 3: Автоматичний запуск після подачі живлення на шафу керування
З’єднайте клеми VCC та 24VEN перемичкою.
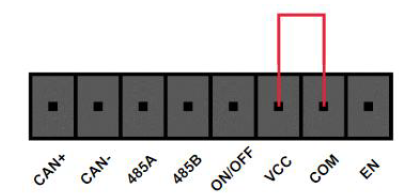
Рисунок 5.3.14 Схема підключення запуску живлення (3)
Мережевий порт LAN
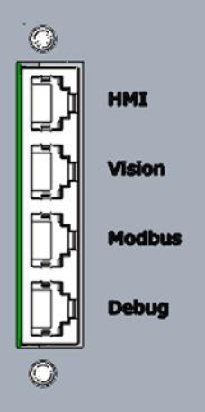
Рисунок 5.3.15 Мережевий інтерфейс
Таблиця 5.3.6 Опис LAN портів
| LAN порти | Опис |
|---|---|
| HMI | Підключення до панелі оператора або планшета. Пряме підключення до внутрішнього маршрутизатора, який підключений до порту ETH0 контролера KEBA. |
| Vision | Підключення системи технічного зору. Пряме підключення до внутрішнього маршрутизатора, який підключений до порту ETH0 контролера KEBA. |
| Modbus | Порт підключення шини Modbus. Пряме підключення до внутрішнього маршрутизатора, який підключений до порту ETH0 контролера KEBA. |
| Debug | Порт налагодження (debug). Пряме підключення до порту ETH1 внутрішнього контролера KEBA. |
Живлення та підключення
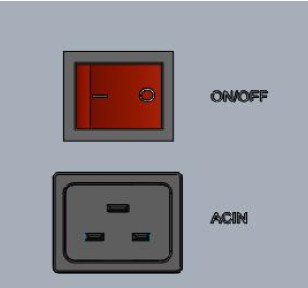
Рисунок 5.3.16 Свіч та підключення живлення
Змінне (AC) та постійне (DC) джерела живлення не можна підключати одночасно. Під час використання на кабель живлення ACIN необхідно встановити феритовий (магнітний) фільтр для зменшення електромагнітних завад (EMC).