Складові частини робота
Робот серії Codroid S має шість обертових осей. Конструктивно маніпулятор складається з великої та малої ланки, які виконують функцію з’єднувальних елементів кінематичного ланцюга. Основа маніпулятора оснащена роз’ємом, що зв’язує його з контролером. На кінці маніпулятора розміщені кнопка керування та світловий індикатор. На боковій частині фланця інструмента встановлені кнопка, дисплей та роз’єм для комутації схвату.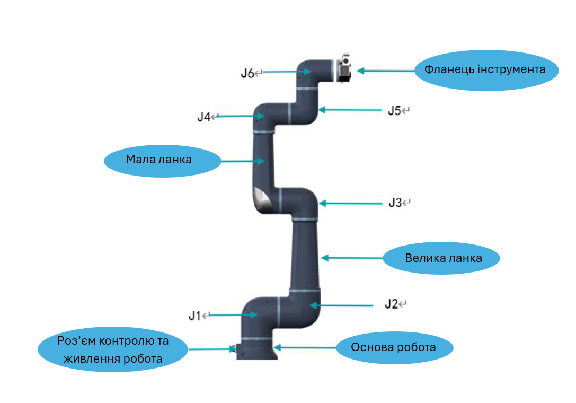
Рис. 4.1.2 Складові частини робота
Робоча зона маніпулятора
Під час вибору місця встановлення робота та його програмування необхідно враховувати циліндричний простір, розташований безпосередньо над та під маніпулятором. Слід уникати переміщення інструмента в межах цього циліндричного простору, оскільки це може призвести до входження в сингулярну зону. У такому випадку окремі осі можуть розвивати надмірно високу кутову швидкість під час руху. Це знижує ефективність роботи робота та ускладнює виконання коректної оцінки ризиків.
 | УВАГА! Під час роботи робота в ручному режимі (режим навчання) тільки оператор повинен знаходитись в робочій зоні кобота. У ручному режимі кнопка аварійної зупинки на ручному пристрої керування повинна знаходитися в межах досяжності оператора. Робоча зона робота визначається як максимальний простір переміщення маніпулятора за відсутності встановлених програмних або апаратних обмежень руху. Обмеження руху робота можуть бути налаштовані таким чином, щоб усі виконувані операції не виходили за межі максимально допустимого робочого простору маніпулятора. |
|---|
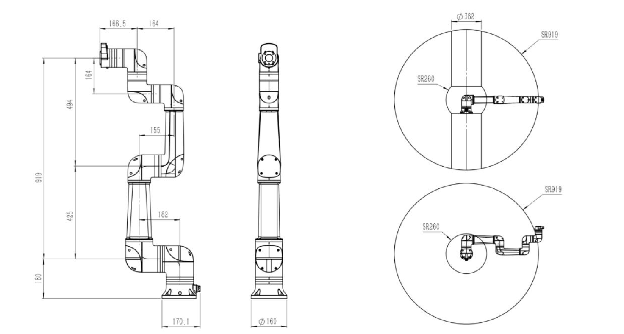
Рис. 4.2.1 Габаритні розміри та робочий простір робота S5-90
Діаграма навантаження
Максимально допустиме корисне навантаження маніпулятора залежить від зміщення центра мас. Зі збільшенням відстані центра мас навантаження відносно фланця інструмента допустиме навантаження зменшується. Для визначення допустимого навантаження необхідно:
- прийняти ексцентриситет навантаження в площині XY як ординату;
- прийняти значення зміщення по осі Z як абсцису;
- визначити відповідну координатну точку ексцентричного навантаження на діаграмі.
- Далі слід встановити, під якою кривою навантаження розташована ця точка. Значення навантаження, зазначене для цієї кривої, є максимально допустимим навантаженням робота за даних умов експлуатації.
Сумарна маса інструмента та заготовки (виробу), встановлених на фланці робота, не повинна перевищувати максимально допустиме навантаження.
| УВАГА! Під час розрахунку навантаження необхідно враховувати масу перехідного (медіа) фланця та забезпечити відповідність сумарного навантаження технічним характеристикам робота. Забороняється перевищувати максимально допустиме навантаження робота. Користувач повинен виконати повний розрахунок для перехідного фланця та встановленого схвату разом з предметом, що захоплюється з метою запобігання таким небезпекам, як ударні навантаження, вібрації, зіткнення, защемлення, проколювання та інші потенційні ризики. Необхідно забезпечити загальну безпеку всієї роботизованої системи. |
|---|
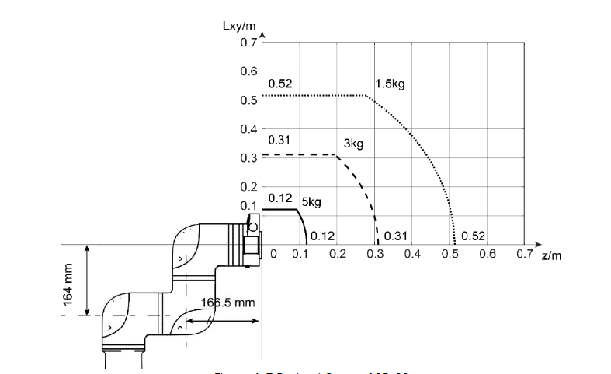
Рис 4.3.1 Діаграма допустимого навантаження кобота S5-90
Інтерфейс фланця
Фланець оснащений чотирма різьбовими отворами M6, призначеними для кріплення інструмента до робота.
Конструкція фланця відповідає вимогам національного стандарту GB/T_14468.1-50-4-M6 або міжнародного стандарту ISO 9409-1-50-4-M6.
Гвинти M6 повинні затягуватися з моментом 12 Н·м. Клас міцності гвинтів — 12.9. Глибина загвинчування кріпильних гвинтів під час монтажу інструмента не повинна перевищувати 8 мм.
Для забезпечення точної повторюваності позиціонування інструмента необхідно використовувати штифт у передбаченому отворі Ø6 для базування.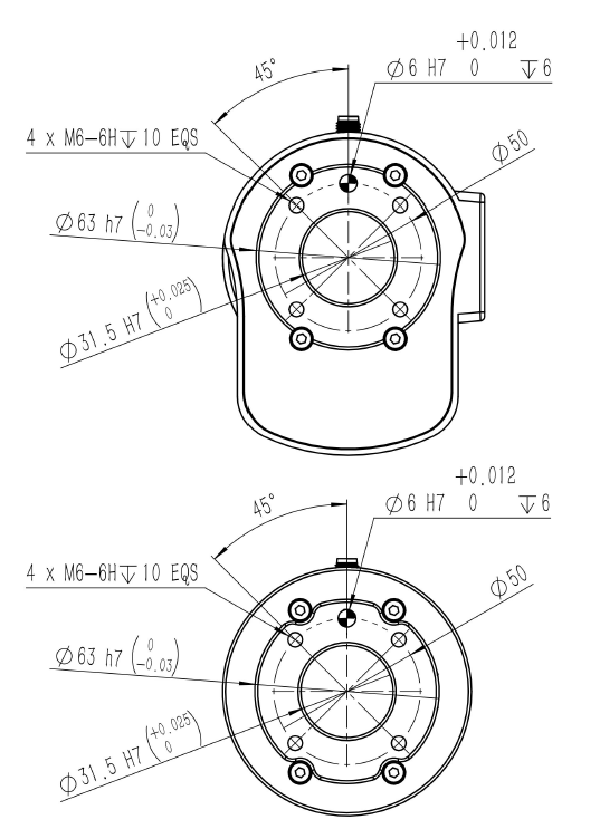
Рис. 4.4.1 Схема механічного монтажу фланця S5-90 Pro
Специфікація робота
Таблиця 4.5.1 Специфікація робота
| Параметр | S5-90 |
|---|---|
| Кількість ступенів свободи | 6 |
| Корисне навантаження | 5 кг |
| Досяжність | 919 мм |
| Повторюваність позиціонування | ±0,03 мм |
| Маса | 22 кг |
| Сертифікація | EN ISO 13849-1 PL d Cat.3; EN ISO 10218-1 |
| Робочий діапазон осей | Осі 1/2/4/5/6: ±360°; Вісь 3: ±160° |
| Максимальна швидкість осей | Осі 1/2/3: 150 °/с; Осі 4/5/6: 180 °/с |
| Максимальна швидкість TCP | 2,5 м/с |
| Інтерфейси зв’язку | 2DI, 2DO, 24VDC, MODBUS RTU, RS485 |
| Монтаж | Будь-яка орієнтація |
| Робоча температура | 0–40 °C |
| Робоча вологість | До 70% RH (без конденсації) |
| Рівень шуму | ≤65 дБ |
Контролер
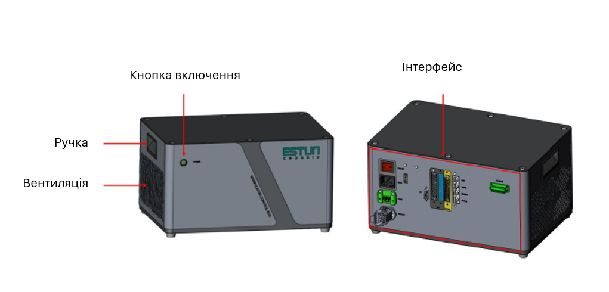
Рис. 4.6.1 Інтерфейси шафи керування
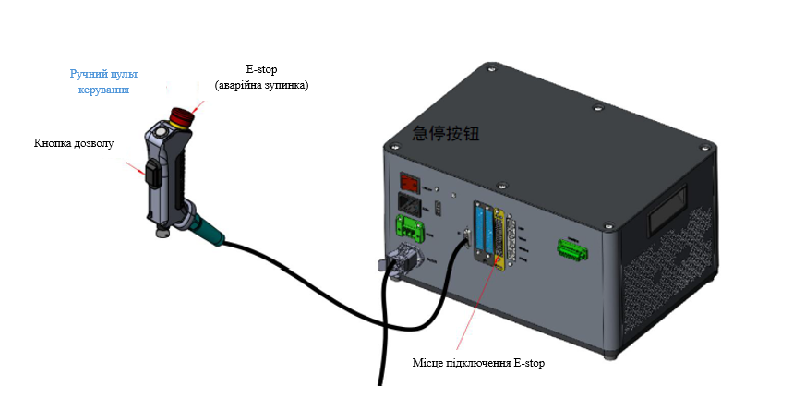
Рис. 4.6.2 Схеми розташування кнопок аварійної зупинки та вимикачів, а також схеми розташування інтерфейсу безпечного вводу/виводу (Safety I/O)
Таблиця 4.6.1 Технічні характеристики контролера
| Параметр | Значення |
|---|---|
| Пристрої безпеки | 1 канал ручного дозволу (Enable), 1 канал ручної аварійної зупинки (E-stop) |
| Ступінь захисту (IP) | IP20 |
| I/O порти | 16 DI, 8 DO, 4 AI / 4 AO, 7 входів зупинки |
| Живлення I/O | 24 VDC, 2 A |
| Робоча температура | 0–40 °C |
| Робоча вологість | 10–90% RH, без конденсації |
| Рівень шуму | ≤65 дБ |
| Висота встановлення над рівнем моря | До 1000 м |
| Живлення | AC 100–240 В, 50/60 Гц |
| Габаритні розміри | 380 × 260 × 200 мм |
| Маса | 14 кг (шафа для робота 20 кг), 11,8 кг (шафи для роботів 10 кг і менше) |
Пульт керування
Ручний пульт керування оснащений чотирма перемикачами/кнопками:
- кнопкою аварійної зупинки (Emergency Stop);
- кнопкою увімкнення/вимкнення живлення;
- перемикачем дозволу (Enable switch);
- перемикачем режиму роботи (Mode switch).
Розташування елементів наведено на рисунку 4.7.1. Якщо робот вимкнений, натискання кнопки живлення здійснює його ввімкнення.
Якщо робот увімкнений, для його вимкнення необхідно натиснути та утримувати кнопку живлення протягом 10 секунд.
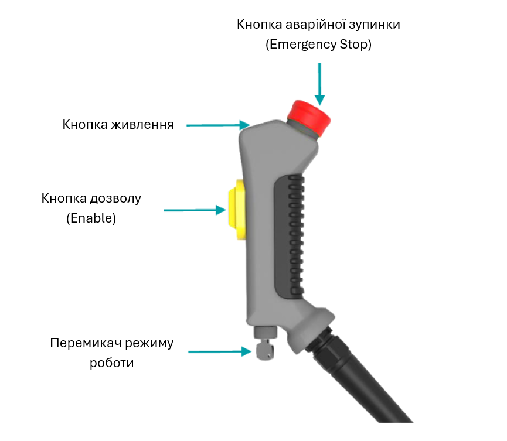
Рис. 4.7.1 Розташування елементів керування на ручному пульті
У разі аварійної ситуації необхідно натиснути кнопку аварійної зупинки на ручному пульті. Після цього робот переходить у стан блокування: рух усіх осей припиняється, приводи виключаються.
Після натискання кнопка аварійної зупинки фіксується в натиснутому положенні. Для її розблокування необхідно повернути кнопку у напрямку, зазначеному на її корпусі. Лише після розблокування можливе скидання аварійного стану через програмне забезпечення керування, після чого можна активувати перемикач дозволу (Enable) для відновлення роботи робота.
Перемикач дозволу є трипозиційним. У ручному режимі робот може рухатися лише тоді, коли перемикач знаходиться у середньому положенні.
У разі повного відпускання або повного натискання перемикача автоматично активується зупинка типу 2 (Stop Category 2).
| УВАГА! Забороняється встановлювати додатковий перемикач дозволу (Enable switch). Забороняється будь-яким чином відключати або обходити перемикач дозволу. Забороняється змінювати або модифікувати конструкцію перемикача дозволу. Перемикач дозволу функціонує лише в ручному режимі роботи. В автоматичному режимі він не активує жодну функцію зупинки. |
|---|