Розміщення, схема розташування позицій
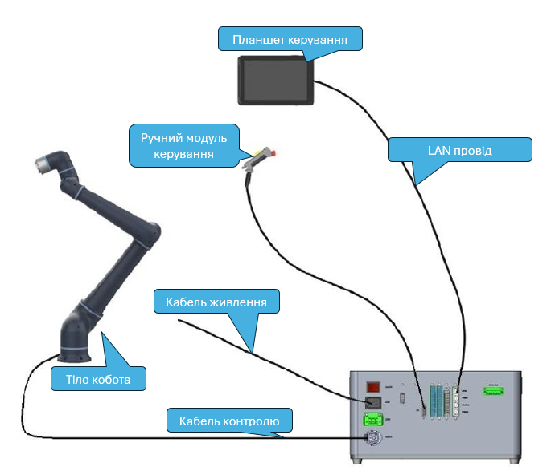
Рис. 3.1.1 Схематична діаграма підключення компонентів робота
Рекомендація: Під час роботи робота оператор повинен перебувати поза зоною досяжності маніпулятора для забезпечення особистої безпеки.
Даний робот оснащений функцією виявлення зіткнення та відповідає вимогам стандарту ISO/TS 15066:2016.
Підготовка та запуск
Після правильного підключення кабелів робота подайте живлення на систему та увімкніть контролера. При цьому буде чути запуск вентилятора в шафі керування. Далі натисніть кнопку живлення на передній панелі шафи керування. Кнопка засвітиться зеленим світлом і залишатиметься увімкненою — це означає, що шафа керування перебуває під живленням.
Порядок запуску та входу в систему:
- Дочекайтеся, поки світлова індикація на кінцевій вісі маніпулятора стане білою без миготіння, а на малому дисплеї з’являться повідомлення:
- Communication [Real-time]
- Operation [Normal]
Це означає, що контролер успішно запущений і кобот встановив зв’язок із контролером. Після цього можна виконати вхід до веб-інтерфейсу для керування роботом.
Увімкніть планшет та в налаштуваннях змініть його статичну IP-адресу на:
192.168.101.XXXВідкрийте браузер і введіть IP-адресу робота в адресному рядку:
192.168.101.100:9098Натисніть Enter, щоб перейти на сторінку входу.
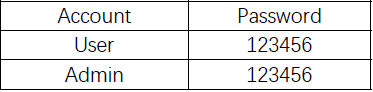
Якщо сторінка входу не відкривається, перевірте IP-адресу планшета. Якщо доступ усе одно неможливий, зверніться до служби післяпродажного обслуговування.Для входу на сторінку керування введіть ім’я користувача та пароль(див. таблицю 3.2.1). Початкові облікові записи та паролі наведені нижче. Різні облікові записи мають різні рівні доступу.
Таблиця 3.2.1 Рівні доступу та паролі
Після авторизації користувача відкривається сторінка керування роботом. На цьому етапі можна виконати подачу живлення на приводи вісей.
Перед подачею живлення необхідно переконатися, що:
- кнопка аварійної зупинки на ручному пристрої керування розблокована (стан Emergency Stop — скинуто);
- у межах робочої зони кобота відсутні люди, інструмент та інше обладнання.
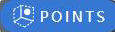
У вкладці «3D Simulation» натисніть кнопку «Power On » (див. рис. 3.2.1 — Інтерфейс керування). Після активації команди відбудеться подача живлення на серводвигуни осей. Характерний звук розблокування гальм свідчить про зняття механічного гальмування та перехід осей у стан готовності до руху.
» (див. рис. 3.2.1 — Інтерфейс керування). Після активації команди відбудеться подача живлення на серводвигуни осей. Характерний звук розблокування гальм свідчить про зняття механічного гальмування та перехід осей у стан готовності до руху.
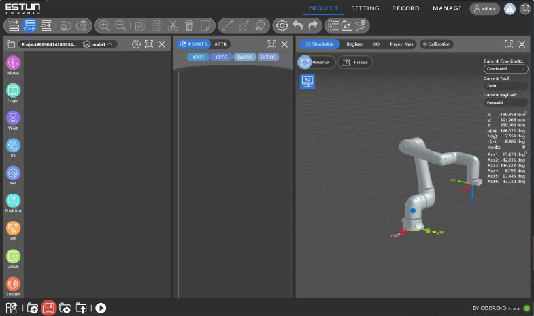
Рис. 3.2.1 — Інтерфейс керування коботом
- Як показано на головному інтерфейсі (див. рис. 3.2.2), індикація підтверджує успішну подачу живлення на приводи осей робота. Після цього робот переходить у стан готовності до руху, і оператор може виконувати керування переміщенням робота через інтерфейс керування.
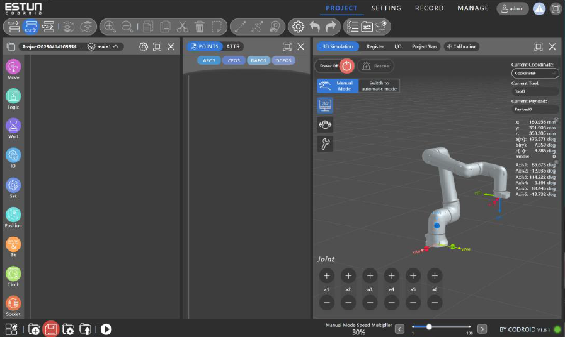
Рис. 3.2.2 Головний інтерфейс з індикацією
Написання програми
У ручному режимі робот може виконувати покрокове переміщення (jog) як у координатах осей, так і по координатах інструмента (TCP).
Переміщення по осях (Joint jogging):
Дозволяє керувати роботом у режимі переміщення по одній осі (поелементний рух осей). Швидкість переміщення регулюється вручну шляхом зміни коефіцієнта швидкості (speed ratio).
Позначення A1, A2, A3.. відповідають осям робота.
Переміщення по TCP (End-effector jogging):
Дозволяє керувати рухом робота в декартовій системі координат. Швидкість переміщення регулюється шляхом зміни ручного множника швидкості (manual speed multiplier). Опорну систему координат під час руху можна змінювати, перемикаючись між поточною системою координат і системою координат інструмента (Tool coordinate system).
Позначення:
- X, Y, Z — напрямки трьох осей опорної системи координат;
- A, B, C — обертання навколо осей X, Y, Z відповідно.
Покрокове створення програми:
У ручному режимі виконайте керування роботом та перемістіть його в задану (цільову) точку.
Натисніть “
 pose”, після цього натисніть “
pose”, після цього натисніть “ ” щоб записати позицію P1
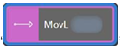
” щоб записати позицію P1Виконайте покрокове переміщення (jog) робота до іншої позиції та повторіть кроки 1 і 2 для додавання другої точки (див. рисунок 3.3.1).
Оберіть “
 jogging”, у лівій колонці та натисніть або перетягніть “
jogging”, у лівій колонці та натисніть або перетягніть “ ” праворуч до дерева програми, щоб додати інструкцію.
” праворуч до дерева програми, щоб додати інструкцію.
Рис. 3.3.1 Інтерфейс з запрограмованими точками
Оберіть “
 ” у дереві програми та натисніть “
” у дереві програми та натисніть “ parameters” з’явиться відповідна колонка параметрів цієї інструкції. У полі Target position виберіть точку P1, яку було щойно задано, а в полі Target speed залиште системне значення за замовчуванням V100.
parameters” з’явиться відповідна колонка параметрів цієї інструкції. У полі Target position виберіть точку P1, яку було щойно задано, а в полі Target speed залиште системне значення за замовчуванням V100.
Якщо на сторінці параметрів інструкції не відображається червоний текст помилки, це означає, що налаштування завершено.Повторіть попередній крок та додайте ще одну інструкцію з відповідними параметрами.
Додайте “
 ” інструкцію із розділу “
” інструкцію із розділу “ logic” та перетягніть її на початок програми. В колонці параметрів задайте інструкції ім’я.
logic” та перетягніть її на початок програми. В колонці параметрів задайте інструкції ім’я.Додайте “
 ” інструкцію із розділу “ logic” та перетягніть її на кінець програми. В колонці параметрів інструкції у полі Jump оберіть ім’я, що задавали в попередній команді. Це дозволяє програмі виконуватись безперервно та циклічно, як показано на рисунку нижче.
” інструкцію із розділу “ logic” та перетягніть її на кінець програми. В колонці параметрів інструкції у полі Jump оберіть ім’я, що задавали в попередній команді. Це дозволяє програмі виконуватись безперервно та циклічно, як показано на рисунку нижче.
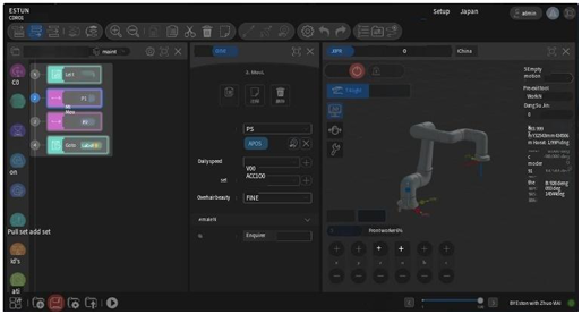
Рис. 3.3.2 Інтерфейс з програмою
Натисніть “
 ”, щоб зберегти програму, з’явиться спливаюче вікно після збереження.
”, щоб зберегти програму, з’явиться спливаюче вікно після збереження.Натисніть “
 ” і натисніть OK, щоб переключити робота в автоматичний режим.
” і натисніть OK, щоб переключити робота в автоматичний режим.Натисніть “
 ” й оберіть Auto Execute, і робот переміститься з P1 до P2.
” й оберіть Auto Execute, і робот переміститься з P1 до P2.Підтвердьте вибір, щоб переключити робота в автоматичний режим.
Натисніть на “
 ” щоб призупинити програму робота, робот одночасно зупинить своє рухання.
” щоб призупинити програму робота, робот одночасно зупинить своє рухання.Після того як робот призупинився, натисніть “
 ”, щоб відновити виконання програми робота.
”, щоб відновити виконання програми робота.Натискання “
 ” зупинить програму робота і робот припинить рух.
” зупинить програму робота і робот припинить рух.Якщо робот був переміщений вручну або зупинений після паузи програми, спочатку його потрібно перевести в ручний режим, а потім знову переключити в автоматичний режим після того, як робот “
 переміститься до точки відновлення руху”, щоб програма могла продовжити виконання.
переміститься до точки відновлення руху”, щоб програма могла продовжити виконання.
Вимкнення живлення
Відрегулюйте робота у правильне положення, натисніть “ shut down”, і робот вимкнеться. Потім натисніть і утримуйте кнопку живлення на контролері, поки постійне зелене світло не згасне, після чого відпустіть кнопку.
shut down”, і робот вимкнеться. Потім натисніть і утримуйте кнопку живлення на контролері, поки постійне зелене світло не згасне, після чого відпустіть кнопку.
Передпусковий чекліст (операторський)
Перед запуском циклу оператор повинен послідовно виконати:
- Виконати safety-перевірку: огорожі та доступ у робочу зону відповідають режиму роботи, кнопки аварійної зупинки доступні й працездатні, у зоні руху відсутні сторонні предмети.
- Перевірити живлення та інтерфейси: подано живлення на Robot Controller, Jetson і Compute Box, мережеві з’єднання активні, порти досяжні, OAK-D визначається системою.
- Перевірити ПЗ: UI доступний на Jetson, тести robot/gripper проходять без помилок, актуальні калібрування завантажено з data/.
- Виконати тестовий dry-run без ризику зіткнення та зафіксувати результат у змінному журналі.