Заходи безпеки
Переконайтеся, що робот та інструмент правильно та надійно закріплені болтами. Забезпечте достатній простір для вільного переміщення робота.
Переконайтеся, що заходи безпеки та/або параметри конфігурації безпеки робота, визначені та правильно налаштовані.Під час роботи з роботом не носіть вільний одяг або прикраси. Довге волосся має бути зібране.
Якщо робот пошкоджений, не використовуйте його (наприклад, якщо кришка осі ослаблена, пошкоджена або знята).
Ніколи не вставляйте пальці в блок керування.
Не підключайте жодні пристрої безпеки до стандартного інтерфейсу вводу/виводу (Standard I/O). Для цього слід використовувати лише інтерфейс безпечного вводу/виводу (Safety I/O).
Переконайтеся у правильності параметрів встановлення (зокрема: кут монтажу робота, маса в точці TCP, зміщення TCP, конфігурація безпеки).
Функцію навчання методом «drag-and-drop» (ручне ведення) дозволяється використовувати лише за попереднім виконанням всіх пунктів безпеки.
Інструменти робота та предмети, які захоплює робот не повинні мати гострих кутів.
Потрібно тримати голову та обличчя поза зоною досяжності робота, який працює або готується до запуску.
Під час використання навчального пульта (планшета) слід постійно контролювати рух робота.
Підключення додаткового обладнання або машин може збільшити рівень ризику чи створити нові небезпеки. Необхідно завжди проводити комплексну оцінку ризиків усієї установки.
Забороняється модифікувати робот. Будь-які зміни можуть призвести до непередбачуваних небезпек. Дозволена реконфігурація має виконуватися відповідно до останньої версії відповідних сервісних інструкцій.
Переконайтеся, що користувачі робота знають місцезнаходження кнопки аварійної зупинки (Emergency Stop) та проінструктовані щодо її використання у разі аварійної або нештатної ситуації.
Під час роботи робот і блок керування нагріваються. Не торкайтеся робота під час роботи або відразу після зупинки. Для охолодження вимкніть його та зачекайте приблизно одну годину.
Якщо робот підключений або працює разом з обладнанням, яке може спричинити його пошкодження, рекомендується окремо протестувати всі функції робота та програму робота.
Не піддавайте робот тривалому впливу магнітних полів, відкритого вогню, вибухонебезпечного середовища, радіоперешкод, рідин тощо, оскільки це може призвести до його пошкодження.
Заборонено використовувати роботизовану систему у вибухонебезпечному або потенційно вибухонебезпечному середовищі.
Навіть якщо механічна рука виглядає нерухомою та очікує сигналу запуску, її слід вважати такою, що перебуває в русі. Не наближайтеся до механічної руки.
Під час транспортування, встановлення, експлуатації та технічного обслуговування робота персонал повинен використовувати засоби індивідуального захисту: захисні рукавички, окуляри, взуття з металевим носком (антиздавлювальне) та інші відповідні засоби безпеки для запобігання травмам.
Вимоги безпеки для встановлення стороннього обладнання
Функції безпеки робота загалом відповідають вимогам стандарту ISO 10218-1.
Якщо в системі використовуються елементи керування, пов’язані з безпекою (наприклад, аварійна зупинка, захисні зони, контроль швидкості тощо), їхня конструкція повинна забезпечувати таке:
- Вихід з ладу одного компонента не повинен призводити до втрати функції безпеки. Тобто система повинна залишатися безпечною навіть при одиничній несправності.
- Якщо виникає несправність, вона повинна бути виявлена до або під час наступного використання функції безпеки.
- У разі виникнення несправності система повинна залишатися в безпечному стані доти, доки проблему не буде усунено.
- Усі можливі та передбачувані несправності повинні бути виявлені системою.
Такі вимоги відповідають структурі Категорії 3 згідно зі стандартом ISO 13849-1. Категорія 3 зазвичай означає, що система має резервування (дублювання) — наприклад, два незалежні канали безпеки, які контролюють один одного. Якщо один канал відмовляє, другий забезпечує збереження безпечного стану.
Функції безпеки та контролер робота відповідають рівню ефективності Performance Level (PL) d, що також визначено стандартом ISO 13849-1.
Категорії зупинки
Тип 0 (Stop Category 0) — Некерована зупинка.
- Робот зупиняється шляхом негайного відключення живлення приводів (актуаторів).
Тип 1 (Stop Category 1) — Керована зупинка з відключенням живлення після зупинки.
- Приводи активно гальмують робот, але не гарантують точну зупинку по запланованій траєкторії. Після повної зупинки живлення вимикається.
Тип 2 (Stop Category 2) — Керована зупинка без відключення живлення.
- Приводи активно гальмують робот і забезпечують його зупинку по траєкторії. Після зупинки живлення не відключається.
Відповідно до стандарту IEC 60204-1, роботи Codroid підтримують три категорії зупинки:
- Stop Category 0 (Cat.0)
- Stop Category 1 (Cat.1)
- Stop Category 2 (Cat.2)
Cat.0 є некерованою зупинкою, тоді як Cat.1 і Cat.2 — керованими.
Аварійна зупинка (Emergency Stop)
Згідно зі стандартами IEC 60204-1 та ISO 13850, пристрій аварійної зупинки **не є захисним огородженням**.
Він є додатковим засобом захисту і не призначений для запобігання травмам у штатному режимі.
У разі аварійної ситуації натисніть кнопку аварійної зупинки — це негайно припинить усі рухи робота та зафіксує його.
⚠ Аварійна зупинка не повинна використовуватися як основний засіб зниження ризику. Це допоміжний (вторинний) захисний засіб, який застосовується лише в критичних ситуаціях.
У нормальних умовах для зупинки руху робота слід використовувати інші передбачені методи.
Особливості роботи аварійної зупинки
При натисканні кнопки аварійної зупинки:
- живлення приводів відключається;
- гальма в осях робота автоматично блокують вісі.
Через дію сили тяжіння можливий незначний рух маніпулятора після спрацювання гальм — це нормальне явище. Проте воно може створювати ризик защемлення або зіткнення.
Технічні примітки
Реалізація категорії зупинки здійснюється через приводи осей. Детальніше — у стандарті IEC 61800-5-2. Функції аварійної зупинки (Emergency Stop) та захисної зупинки (Protective Stop) реалізуються через інтерфейс безпеки.
Функції безпеки
Таблиця 2.4.1. Функції безпеки кобота CoDroid
| Функція безпеки | Опис |
|---|---|
| Аварійна зупинка (Emergency Stop) | При натисканні кнопки аварійної зупинки активується зупинка категорії 1 (Stop Category 1). |
| Захисна зупинка (Protective Stop) | При надходженні відповідного сигналу (логічний рівень Low) активується зупинка категорії 2 (Stop Category 2). Функція потребує ручного скидання (reset). |
| Безпечне керування уповільненням (Safety-rated deceleration control) | При відповідному сигналі швидкість TCP зменшується до встановленого граничного значення. |
| Обмеження положення осей | Встановлює допустимий діапазон положень осей. |
| Обмеження швидкості осей | Встановлює допустимий діапазон швидкості осей. |
| Обмеження моменту осей | Встановлює допустимий діапазон крутного моменту осей. |
| Обмеження зони TCP | Встановлює допустимий робочий простір TCP. |
| Обмеження швидкості TCP | Встановлює максимальну швидкість TCP. |
| Обмеження моменту TCP | Встановлює максимальний крутний момент TCP. |
| Обмеження потужності робота | Обмежує максимальну потужність робота. |
| Обмеження напрямку TCP | Визначає допустимі напрямки руху інструменту. |
| Контрольована зупинка з моніторингом (Safety-rated monitored stop) | При відповідному сигналі активується зупинка категорії 2. Функція може бути скинута після відновлення сигналу. |
| Контроль швидкості та відстані | Підтримує мінімальну безпечну дистанцію між оператором і роботом. Робот зупиняється при зменшенні відстані нижче допустимої та автоматично відновлює рух після виходу оператора із зони контролю. |
| Обмеження потужності та моменту | Обмежує максимальну потужність і крутний момент робота. |
Відновлення після аварійної зупинки
Після натискання кнопки аварійної зупинки вона фіксується в натягнутому положенні.
Для її розблокування необхідно повернути кнопку у напрямку, зазначеному на її корпусі.Після розблокування кнопки скидання аварійного стану виконується через програмне забезпечення керування. Після цього необхідно подати живлення та виконати ввімкнення (Enable), щоб вивести робот із аварійного режиму та відновити його роботу.
Примусовий рух без подачі живлення
У разі аварійної ситуації, якщо необхідно перемістити осі робота, але неможливо або недоцільно подавати живлення, допускається використання ручного примусового переміщення без увімкнення приводу. Для виконання примусового переміщення без живлення необхідно прикласти значне зусилля до маніпулятора (штовхати або тягнути), щоб змістити осі робота.
Кожна вісь оснащена гальмом, яке допускає її переміщення при прикладенні достатнього крутного моменту. Ручне переміщення без подачі живлення дозволяється лише в аварійних ситуаціях, оскільки воно впливає на ресурс гальмівного механізму та може скорочувати строк його служби.
Умови зберігання, експлуатації та транспортування
- Температура навколишнього середовища під час зберігання та експлуатації повинна бути в межах від 0 до 40°C.
- Приміщення повинно бути сухим, з низькою вологістю. Допустима відносна вологість — 10–90% без утворення конденсату.
- Місце встановлення повинно мати мінімальний рівень пилу, дрібнодисперсних частинок, масляного туману та вологи.
- У робочій зоні не допускається наявність легкозаймистих матеріалів, корозійно-активних рідин або газів.
- Рівень вібрації або ударного навантаження на шафу керування повинен бути незначним (вібрація менше 0,5G).
- Поблизу не повинно бути потужних джерел електромагнітних завад (наприклад, TIG-зварювання із захисним газом).
- Повинен бути відсутній ризик зіткнення з мобільними пристроями (наприклад, AGV).
- Шафа керування повинна встановлюватися поза робочою зоною робота (за межами захисної огорожі).
- Відстань від шафи керування до стіни повинна становити не менше 200 мм для забезпечення належного відведення тепла та вентиляції.
Позначки шафи керування та корпусу робота
На місцях, де можливе виникнення специфічних небезпек, встановлені попереджувальні знаки та таблички. З метою запобігання нещасним випадкам необхідно суворо дотримуватися інструкцій та вимог, зазначених на цих знаках під час експлуатації.
Забороняється самовільно знімати, пошкоджувати або видаляти попереджувальні знаки. Під час роботи з компонентами або вузлами, на яких розміщені знаки та таблички, а також у прилеглих зонах, слід бути особливо уважними.
Таблиця 2.8.1 Позначення та попереджувальні знаки
| A |  | Обладнання повинно експлуатуватися та обслуговуватися кваліфікованим персоналом із використанням засобів індивідуального захисту. Необхідно дотримуватися інструкцій з монтажу та налаштування обладнання. Неправильна експлуатація може призвести до пошкодження машини або іншого обладнання, а також до травмування персоналу. |
|---|---|---|
| B |  | Забороняється відкривати шафу керування або корпус робота та торкатися внутрішніх електронних компонентів і електричних кіл, щоб уникнути ураження електричним струмом. Існує ризик займання або електричного удару. Необхідно використовувати відповідні засоби індивідуального захисту для запобігання ризику електричної дуги (arc flash). Недотримання цих вимог може призвести до травм або смерті. |
| C |  | Гарячі поверхні. Можливе отримання опіків або інших травм у разі контакту. |
| D |  | Корпус робота створює магнітне поле, яке може бути шкідливим для людини та електронного обладнання. |
| E |  | Заводська табличка виробу для підтвердження основної інформації про продукт. |
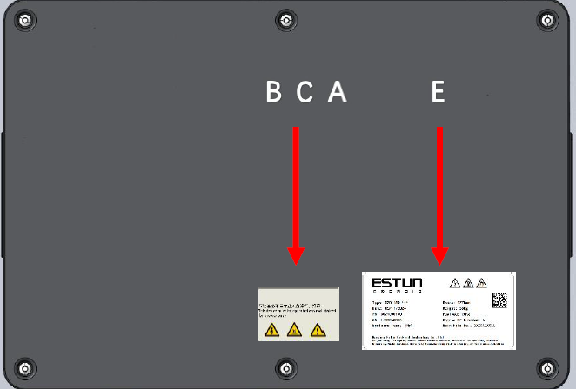
Рисунок 2.8.1. Місця встановлення попереджувальних знаків та ідентифікаційної таблички на шафі керування.)
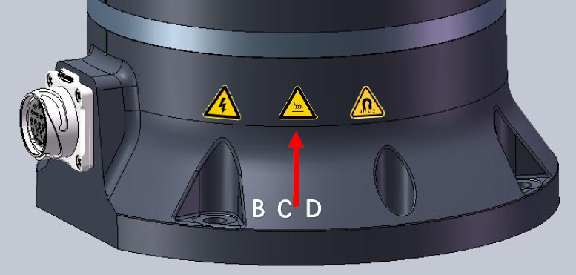
Рисунок 2.8.2. Схема розміщення попереджувальних знаків на корпусі робота
Операційні режими і межі
У типовій лабораторній експлуатації застосовуються три режими:
| Режим | Призначення | Дозволені дії | Заборонені дії |
|---|---|---|---|
| Manual | Налаштування, навчання точок, сервісні переміщення | Локальні перевірки, калібрування, контрольний verification move | Запуск автоматичного циклу без підтвердження безпеки |
| Auto | Виконання підготовленого виробничого сценарію | Контрольований запуск pick -> drop за валідних передумов | Старт без калібрувань, при неактивному safety-контурі або невідомому стані інструмента |
| Rescue | Безпечне виведення системи зі стану помилки | Відновлювальні дії за затвердженою процедурою | Прямий перехід до Auto без повторної перевірки |
Умови переходу між режимами:
- Manual -> Auto: після операторського чекліста, підтвердження безпечної зони та тесту зв’язності.
- Auto -> Manual: під час паузи, зупинки програми, корекції позицій або сервісної діагностики.
- Any -> Rescue: у разі Emergency stop, overspeed або помилок інструмента/контролера.
- Rescue -> Auto: лише після успішного відновлення, повторної перевірки камери, робота та грипера, а також тестового dry-run.
Безпечне відновлення після збоїв
Після Emergency stop:
- Негайно зафіксувати причину зупинки та перевірити фізичну безпеку зони.
- Заборонити будь-який автоматичний рух до зняття причини аварії.
- Виконати стандартну процедуру acknowledge/clear в UI.
- Підтвердити, що робот, грипер і камера повернулися в штатний стан.
- Виконати короткий тестовий цикл у контрольованому режимі.
Після Overspeed / Joint protection / Tool error:
- Перевести програму у pause або reset.
- Перевірити останню команду, активну систему координат і межі швидкості/траєкторії.
- Для tool error перевірити зв’язок з Compute Box, механіку грипера та тайм-аути захвату.
- Виконати clear відповідного стану і повторити діагностичний запуск.
Відновлення без інженера заборонено, якщо:
- Помилка повторюється після двох коректних спроб відновлення.
- Є невідповідність між очікуваною і фактичною траєкторією робота.
- Виявлено нестабільність кріплення камери, інструмента або кабельної траси.
- Є підозра на firmware/мережеву деградацію контролера або Compute Box.